Page Not Found
Page not found. Your pixels are in another canvas.

A list of all the posts and pages found on the site. For you robots out there is an XML version available for digesting as well.
Page not found. Your pixels are in another canvas.
About me
This is a page not in th emain menu
Published:
We proposed a fleet of autonomous ground vehicle to perform basic agricultural operation on slopes 
Published in , 2017
Development and Evaluation of Inclined Plate Metering Mechanism for Soaked Okra (Abelmoschus esculentus) Seeds [Pdf]
Badgujar, C.M., Dhingra, H., Mannes, G., & Khurana, R. (2017). Development & evaluation of inclined plate metering mechanism for soaked okra (Abelmoschus esculentus) seeds. International Journal of Current Microbiology & Applied Sciences, 6(12). [Link]
Published in , 2018
Engineering properties of okra (Abelmoschus esculentus) seed [Pdf]
Badgujar, C M, Dhingra, H. S., Manes, G. S., Khurana, R., & Gautam, A. (2018). Engineering properties of okra (Abelmoschus Esculentus) seed. Agricultural Research Journal, 55(4), 722. [Link]
Techno-Economic Evaluation of Solar Tunnel Dryer for Drying of Basil (Ocimum sanctum) [Pdf]
Badgujar, C.M., Karpe, O., & Kalbande, S. (2018). Techno-economic evaluation of solar tunnel dryer for drying of basil (Ocimum sanctum). International Journal of Current Microbiology & Applied Sciences, 7(7), 332–39. [Link]
Published in , 2019
Flow Characteristics of Crude Oil with Additive [Pdf]
Kumar, P., & Badgujar, C., (2019). Flow characteristics of crude oil with additive (P. Saha, P. Subbarao, & B. S. Sikarwar, Eds.). In P. Saha, P. Subbarao, & B. S. Sikarwar (Eds.), Advances in fluid and thermal engineering. Singapore, Springer. [Link]
Studies on drying characteristics and techno-economic analysis of sprouted moth beans (Vigna aconitifolia) in solar tunnel dryer [Pdf]
Badgujar, C. M, Karpe, O. S., & Kalbande, S. R. (2019). Studies on drying characteristics & techno-economic analysis of sprouted moth beans (Vigna Aconitifolia) in solar tunnel dryer. Indian Journal of Agricultural Research. [Link]
Published in , 2021
Published in , 2022
Artificial neural network to predict traction performance of autonomous ground vehicle on a sloped soil bin and uncertainty analysis [Pdf]
Badgujar, C., Flippo, D., & Welch, S. (2022). Artificial neural network to predict traction performance of autonomous ground vehicle on a sloped soil bin and uncertainty analysis. Computers and Electronics in Agriculture, 196, 106867. [Link])
Experimental Investigation on Traction, Mobility, and Energy Usage of a Tracked Autonomous Ground Vehicle on a Sloped Soil Bin [Pdf]
Badgujar, C, Flippo, D., Brokesh, E., & Welch, S. (2022). Experimental Investigation on Traction, Mobility & Energy usage of the Tracked Autonomous Ground Vehicle on a Sloped Soil Bin. Journal of the ASABE. [Link]
Pest-infested Soybean Leaf Image Classification with Deep Learning Techniques for Integrated Pest Management (IPM) [Pdf]
Badgujar, C, Mansur, H., & Flippo, D. (2022). Pest-infested Soybean Leaf Image Classification with Deep Learning Techniques for Integrated Pest Management (IPM). Conference Proceedings, 2022 ASABE Annual International Meeting, Houston, Texas. [Link]
Design of a Reconfigurable Crop Scouting Vehicle for Row Crop Navigation: A Proof-of-Concept Study [Pdf]
Schmitz, A., Badgujar, C, Mansur, H., Flippo, D., McCornack, B., & Sharda, A. (2022). Design of a reconfigurable crop scouting vehicle for row crop navigation: A proof-of-concept study. Sensors, 22(16). [Link]
Development and Evaluation of Pasture Tree Cutting Robot: Proof-of-Concept Study [Pdf]
Badgujar, C, Flippo, D., Baldwin, C., & Badua, S. (2022). Development and Evaluation of Pasture Tree Cutting Robot : Proof-of-concept study. Croatian Journal of Forest Engineering, 44(1), 11–19. [Link]
Design, Fabrication, and Experimental Investigation of Screw Auger Type Feed Mechanism for a Robotic Wheat Drill [Pdf]
Badgujar, C, Hui, W., Flippo, D., & Brokesh, E. (2022). Design, fabrication, and experimental investigation of screw auger type feed mechanism for a robotic wheat drill. Journal of ASABE. [Link]
A Distributed Approach for Robotic Coverage Path Planning Under Steep Slope Terrain Conditions [Pdf]
Martinez-Figueora, D., Das, S., Badgujar, C, Flippo, D., & Welch, S. J. (2022). A Distributed Approach for Robotic Coverage Path Planning Under Steep Slope Terrain Conditions. 2022 IEEE Symp. Series on Computational Intelligence (SSCI). [Link]
Published in , 2023
Tree Trunk Detection of Eastern Red Cedar in Rangeland Environment with Deep Learning Technique
Badgujar, C., Daniel Flippo, Sujith Gunturu, Carolyn E. Baldwin (2023). Tree Trunk Detection of Eastern Red Cedar in Rangeland Environment with Deep Learning Technique, Croatian journal of forest engineering, 44(2). [Link]
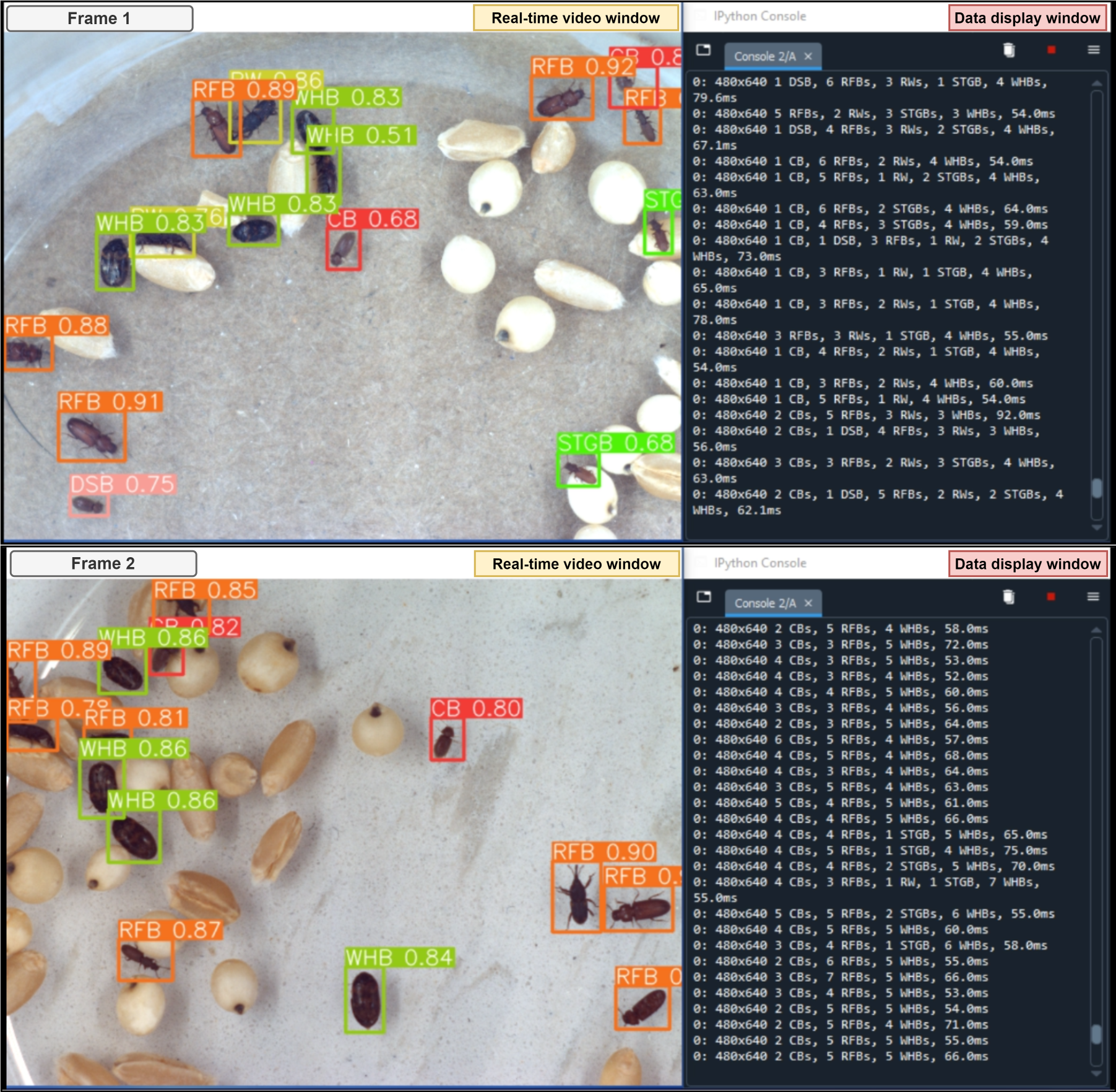
Identifying common stored product insects using automated deep learning methods
Badgujar, C., Paul R. Armstrong, Alison Gerken, James F Campbell (2023). Identifying common stored product insects using automated deep learning methods. Journal of Stored Products Research. [Link]
Application of Computational Intelligence Methods in Agricultural Soil-Machine Interaction: A Review [Pdf]
Badgujar, C., Das, S., Figueroa, D. M., & Flippo, D. (2023). Application of Computational Intelligence Methods in Agricultural Soil-Machine Interaction : A Review. Agriculture, 13(2). [Link]
Deep neural networks to predict autonomous ground vehicle behavior on sloping terrain field [Pdf]
Badgujar, C., Das, S., Flippo, D., Martinez, D., & Welch, S. (2023). Deep Neural Network to Predict the Autonomous Ground Vehicle Behavior on Sloping Terrain. Journal of Field Robotics, 40(2). [Link]
Published:
Published:
Published:
Published:
Published:
Undergraduate course, , 2012